
Scholar E600四驱型机器人线控底盘
产品介绍
Scholar E600 四驱型机器人线控底盘采用RS232与上位机通信,提供串口通信协议、ROS驱动包;适⽤于机器⼈教学、科学研究、无人巡检、物流等领域。
Scholar E600 四驱型机器人线控底盘对外提供直流输出电源,用户可根据实际应用要求,集成IMU、激光雷达、GPS、立体相机、机械手等更多设备。
Scholar E600 四驱型机器人线控底盘的电池仓位于机器人后面板,打开电池仓封口,即可将电池取出,用户可以很方便地更换电池。
规格参数
| 项目 | 指标 | |
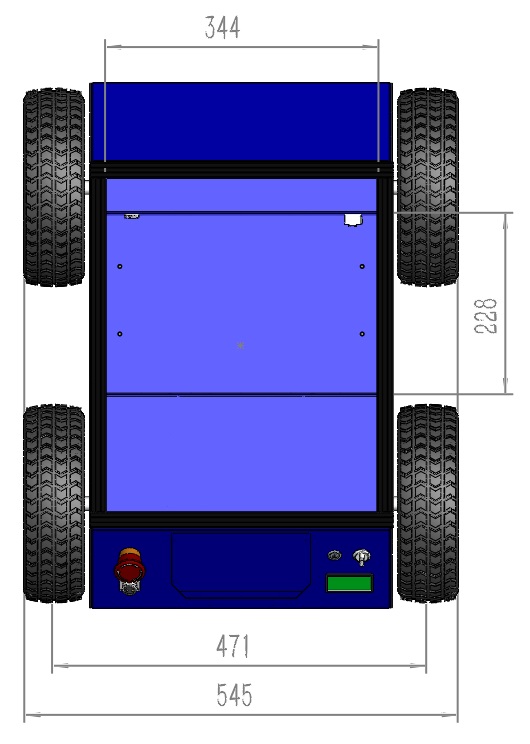
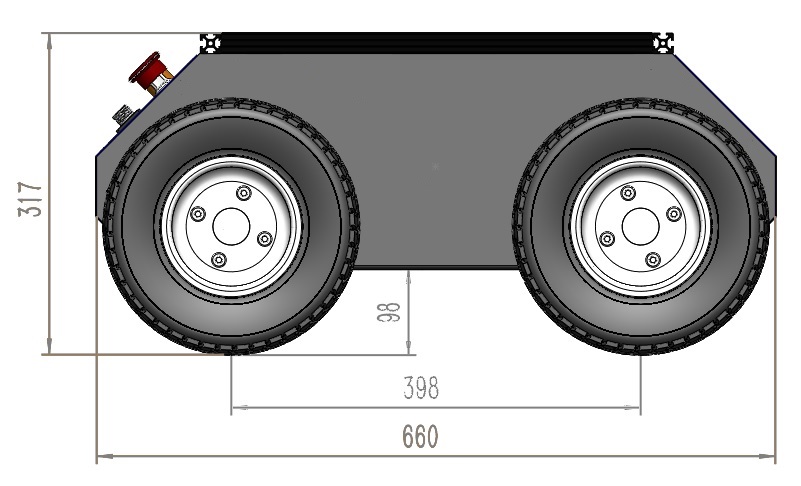
| 尺寸和重量 | 外部尺寸(长 X 宽 X 高) | 660 X 550 X 320 mm |
| 内部尺寸(长 X 宽 X 高) | 340 X 220 X 130 mm | |
| 离地间距 | 90 mm | |
| 轴距 | 471 mm | |
| 前/后轮距 | 398 mm | |
| 车体自重 | 40 Kg | |
| 性能参数 | 最大负载 | 40 Kg |
| 最大线速度 | 1 m/s | |
| 最大爬坡角度 | 20 ° | |
| 最小转弯半径 | 0 m | |
| 转向方式 | 差速转向 | |
| 电机 | 电机类型 | 空心杯直流无刷减速电机 |
| 电机数量 | 4个 | |
| 电机减速比 | 81.4 | |
| 电池和供电 |
电池类型 | 三元锂电池 |
| 电池容量 | 24V@20Ah | |
| 运行时间(空载) | RS232 串口、PS2 | |
| 运行时间(重载) | 锂电池电压、里程计 | |
| 充电时间 | ||
| 通讯 | 控制方式 |
车轮转速、整车速度 |
| 反馈信息 | 电机转速、电池电压 | |
| 通讯接口 |
RS232@115200 | |
| 编程 | ROS,开发通讯协议 |
外观尺寸
可集成配件




产品视频下载观看


